Step 1
OpenCV
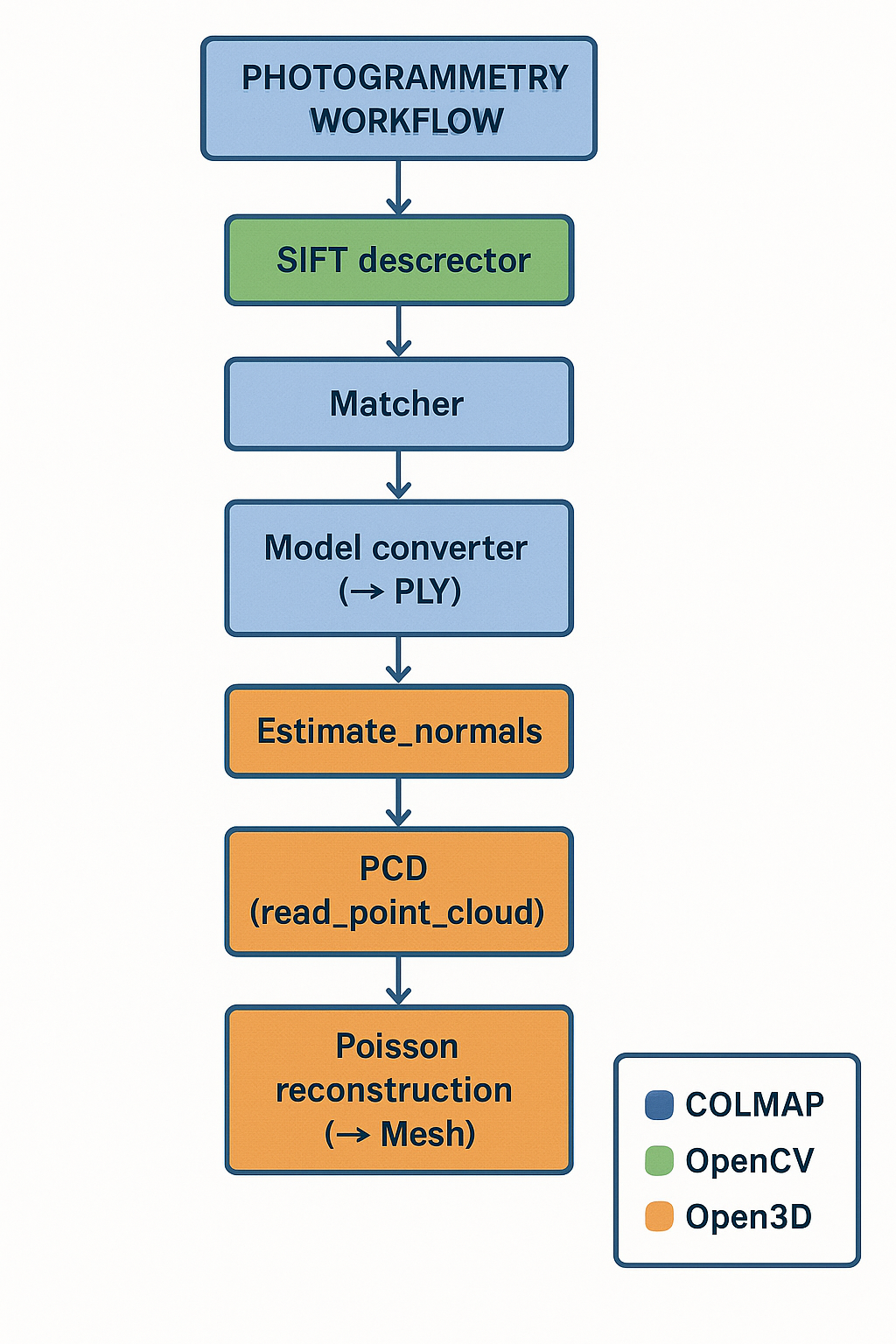
SIFT descriptor
For each image, scale- and rotation-invariant interest points are extracted. The result is a list of keypoints and a descriptor array that will be used for matching between views.
Input: images (JPG/PNG)
Output: keypoints + descriptors
# Minimal Python example
import cv2
img = cv2.imread("image_01.jpg", cv2.IMREAD_GRAYSCALE)
sift = cv2.SIFT_create()
keypoints, descriptors = sift.detectAndCompute(img, None)
print(len(keypoints), "detected points")